Micronor
MR340 Incremental Controller for MR340__ Series Sensors
Part no.: MR340 Incremental Controller for MR340__ Series Sensors
Key Features
• 100% passive sensing design no electronics whatsoever
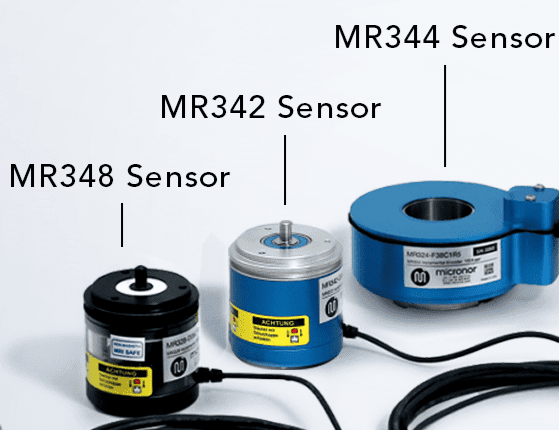
• Linear and rotary sensor configurations
• Sensor can be installed in all manner of hazardous locations and potentially explosive atmospheres
• Immune to EMI and RFI
The MR340-1 DIN Rail Mount Controller is the active optical and electrical interface for the MR340 Series ZapFREE Fiber Optic Incremental Encoder System. The system is an innovative all-optical design immune to any electromagnetic interferences such as magnetic fields, lightning, voltage, and other harsh environment conditions.
As the incremental code passes through an MR34X Sensors internal optical pick-up, the phase output of two
light beams creates the classical A/B quadrature signals accessible via the controllers electrical interface.
The controller keeps track of position and also calculates the RPM and speed of the connected encoder Both position and speed can be read via RS485 Modbus RTU serial interface, USB, SSI or analog output. The analog output can be configured for either ±10V or 4-20mA output.
Call us for more info at 856-727-9500
"*" indicates required fields







 856-727-9500
856-727-9500