Abstract: Tunnel magnetoresistance (TMR) sensing is an exciting new chapter for magnetic-based rotary encoders. Requiring less current, while offering higher signal strength, many of the inherent short comings of Hall Effect based sensors can be addressed. Furthermore, by building on the strengths of magnetic encoders, namely their robustness and lower cost, a new option is now available to control engineers, from industrial automation to battery-powered robotics.
Background: For decades the Hall Effect has been a commonly used sensing principle in rotary sensors. And while great improvements have been made, the inherent drawbacks remain. When compared to traditional optical encoders, these are most notably higher power consumption, lower resolution and reduced performance due to temperature drift. That said, Tunnel magnetoresistance or TMR, is an exciting new sensing mechanism that can address these concerns, bringing the benefits of magnetic encoders to even more applications.
Discovery: For those interested (if not its, ok, skip ahead to the next section), let us take a quick look at how the TMR sensor works. A TMR sensor is comprised of two ferromagnetic layers which are coupled and separated by a very thin non-magnetic, non-conductive insulation layer. Electrons tunnel through this insulation layer to provide a measurement. While the magnetic orientation of the pin layer is fixed, the magnetic orientation of the free layer changes in accordance with the direction of the external magnetic field. As a result, the electrical resistance of the TMR element changes along with this change in free layer.

Left: when the magnetization directions of the free layer and pin layer are parallel, the resistance becomes small and a large current flows.
Right: when the magnetization directions of the free layer and pin layer are antiparallel, the resistance becomes large and only a weak current flows. Image Credit: TDK (link)
In practical use, when a magnet is rotated on a TMR sensor, the resistance value is proportional to the relative angle of the magnetization directions of the pin layer and the free layer, thus making the TMR a full 360 degree angle sensor.
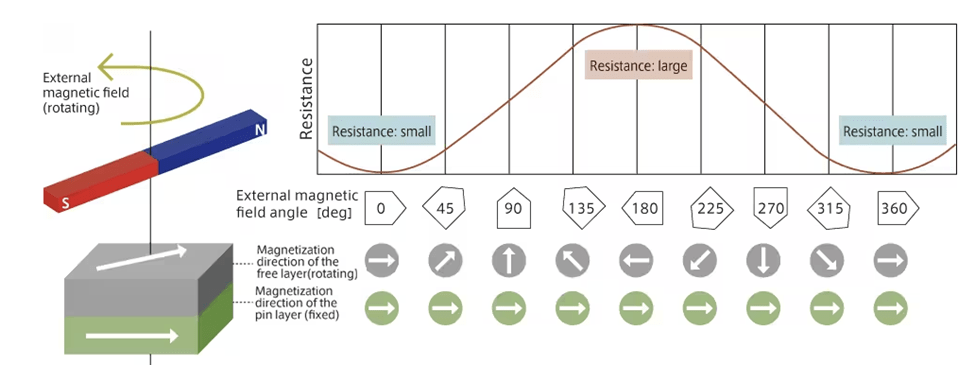
Principle of TMR being used as a 360 degree angle sensor. This is the underlying principle for the technology to be used in rotary encoders. Image Credit: TDK (link)
TMR vs. Hall: Because a TMR sensors has a greater output than a Hall Effect sensor. In a practical sensor this results in lower power consumption and greater performance. Another advantage is that TMR sensors are less sensitive to temperature drift. TDK for example, expects their TMR sensors to have a temperature drift of less than 0.05 degrees, which is less than the 0.09 degree accuracy that many on-axis Hall Effect sensors are currently specified at.
New Applications: For twenty years POSITAL has been offering absolute and incremental rotary encoders based on Hall Effect sensors, but there have always been applications which still relied on traditional optical encoders. Perhaps most exciting about the TMR sensor is that it addresses many of the inherent shortcomings of Hall Effect based encoders, while preserving all of the benefits such as compact size, economical cost and robustness.
- Industrial automation: In material handling and food and beverage, optical encoders may be able to be replaced with lower cost TMR based magnetic encoders. Furthermore, the compact size of magnetic encoders compared to optical encoders means that sensors requiring 316 stainless steel construction and IP68 ratings are less costly, as simply less material and sealing is necessary.
- Robotics: In battery-powered applications such as robotics, TMR sensors offer about a 50% reduction in power consumption compared to their Hall Effect based predecessors.
- Motors and Drives: These applications often see operating temperatures beyond the traditional ‘automotive spec’ of -40 to + 80 degrees C. Not only are higher operational temperatures possible, but there is also a practical improvement in performance (resolution and accuracy) in all environments.
Conclusion: TMR technology offers an exciting, yet practical new chapter for magnetic based rotary encoders. Whether the objective is to reduce cost without sacrificing performance, or bringing the performance of an optical encoder to an application where the robustness of a magnetic encoder is a must, TMR sensors will help to create new products for a wide variety of industries.
Do you have questions?
"*" indicates required fields



