SSI hardware is fairly simple. Just use any RS-422 transceiver to generate the differential signals from/to the microcontroller port pins. Keep reading to learn about the different implementations of SSI hardware.
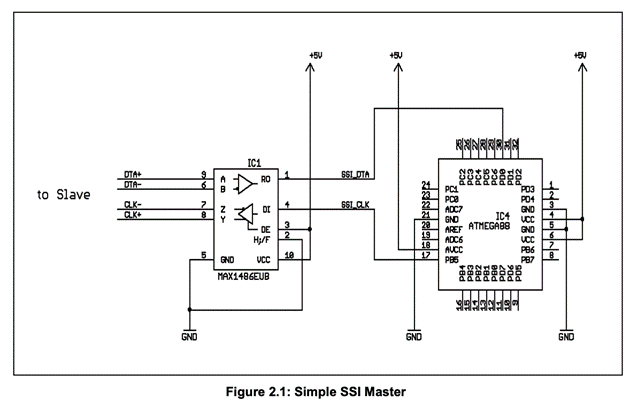
Simple SSI Master Implementation
The following example uses the MAX1486 transceiver from MAXIM. RS-422 transceivers are available from many companies, in various shapes and flavours (3.3V; 5V, single transceiver, multiple transceivers in a single chip etc).
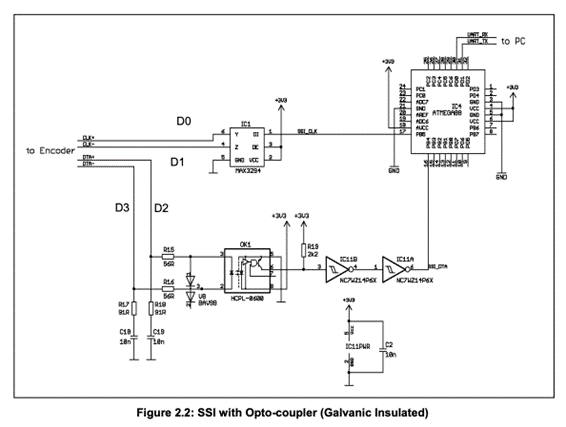
SSI Interface with Opto-coupler (Galvanic Insulated)
A different implementation uses a galvanic insulated master. This insulation isolates functional sections of the system. It is an effective method of breaking ground loops by preventing unwanted current from travelling between two units sharing a ground conductor.
The above implementation in figure 2.2 uses an opto-coupler together with a Schmitt-trigger buffer for the receiver stage and an RS-422 level translator for the transmitter. This version uses a 3.3 V supply instead of 5 V. The encoder contains a similar RS-422 transceiver stage. On the encoder side, CLK+ and CLK- are inputs, and DTA+ and DTA- are outputs.
Illustration of SSI Transfers using differential signals
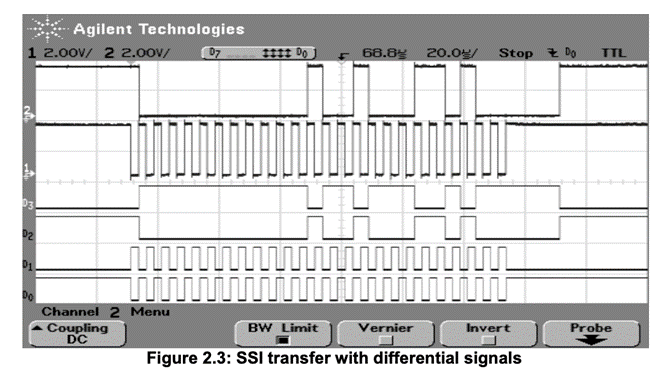
Figure 2.3, shows DTA and CLK at the microcontroller (Ch #1 and Ch #2) and the differential signals to the decoder (D1, D2) and from the encoder (D3, D4).
Illustration of SSI Transfers using differential signals Figure 2.3, shows DTA and CLK at the microcontroller (Ch #1 and Ch #2) and the differential signals to the decoder (D1, D2) and from the encoder (D3, D4).
The clock signal from the SSI master is present as usual, but both input lines (D2 and D3) are low. Since this means the LED inside the opto-coupler is not driven, the pull-up resistor at the output of the optocoupler will return a high signal to the microcontroller (Channel #2).
Interested in discussing the implementation of the SSI interface with us further? Contact us today using the form below!


")

