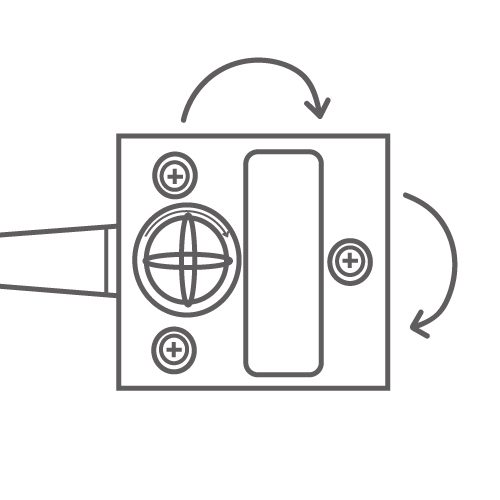
Rotary Sensors
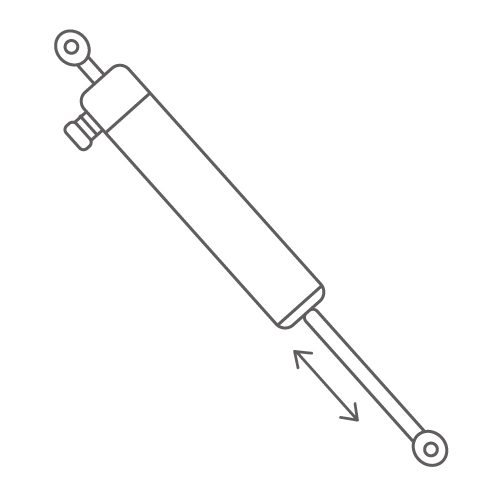
Linear Sensors
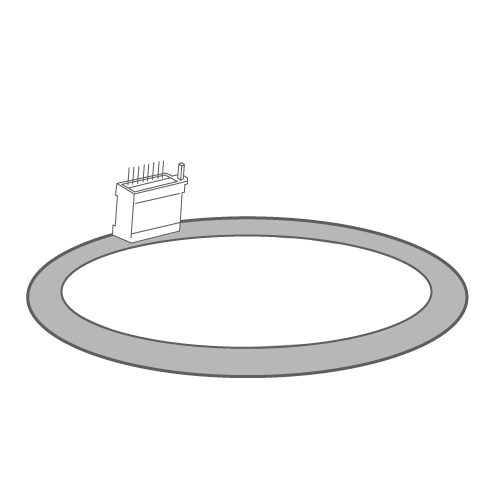
Liquid Level Sensors
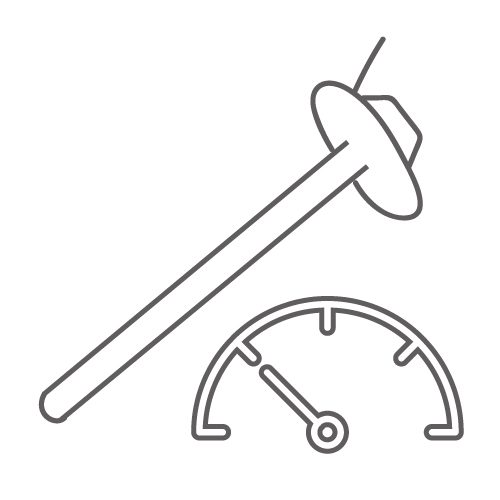
Tilt Sensors

Oil Debris Sensors
Our Work in the World

Everight Position Proudly Receives Lockheed Martin Outstanding Supplier Award
Everight Position is pleased to announce that they have been named an Outstanding Small Business Supplier by Lockheed Martin Missiles and Fire Control
Why Holistic Encoders are More Accurate
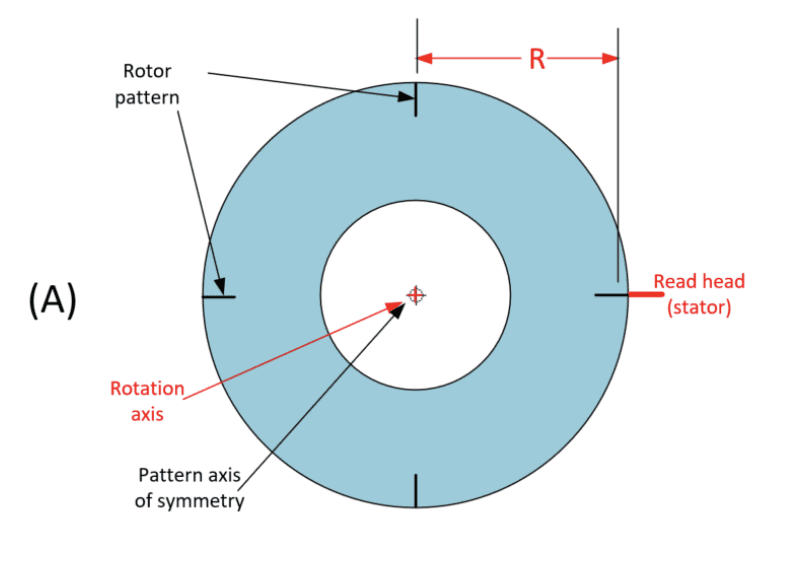
All absolute rotary encoders have a rotor which is attached to the rotating shaft and a stator which is attached to the housing holding the shaft. The interaction of these two components produces a measure of the shafts rotational angle. The most important parameters of absolute rotary sensors are resolution, accuracy and tolerance to misalignment of the rotational axes.

View Our Case Studies and Industries
Learn more about how Everight Position is helping to power leading technology in a variety of industries.
Not sure exactly what you need?
Speak with a sensor specialist todayOr give us a call at 856-727-9500
Email Us at: info@evrtp.com
OUR BRANDS






All of our vendors are ISO9001 certified.


 856-727-9500
856-727-9500