POSITAL
LD0-C
Part no.: LD0-C
Key Features
• Compact housing
• CANopen and SAEJ1939 output available
• 1m to 30m measurement range options
• IP65
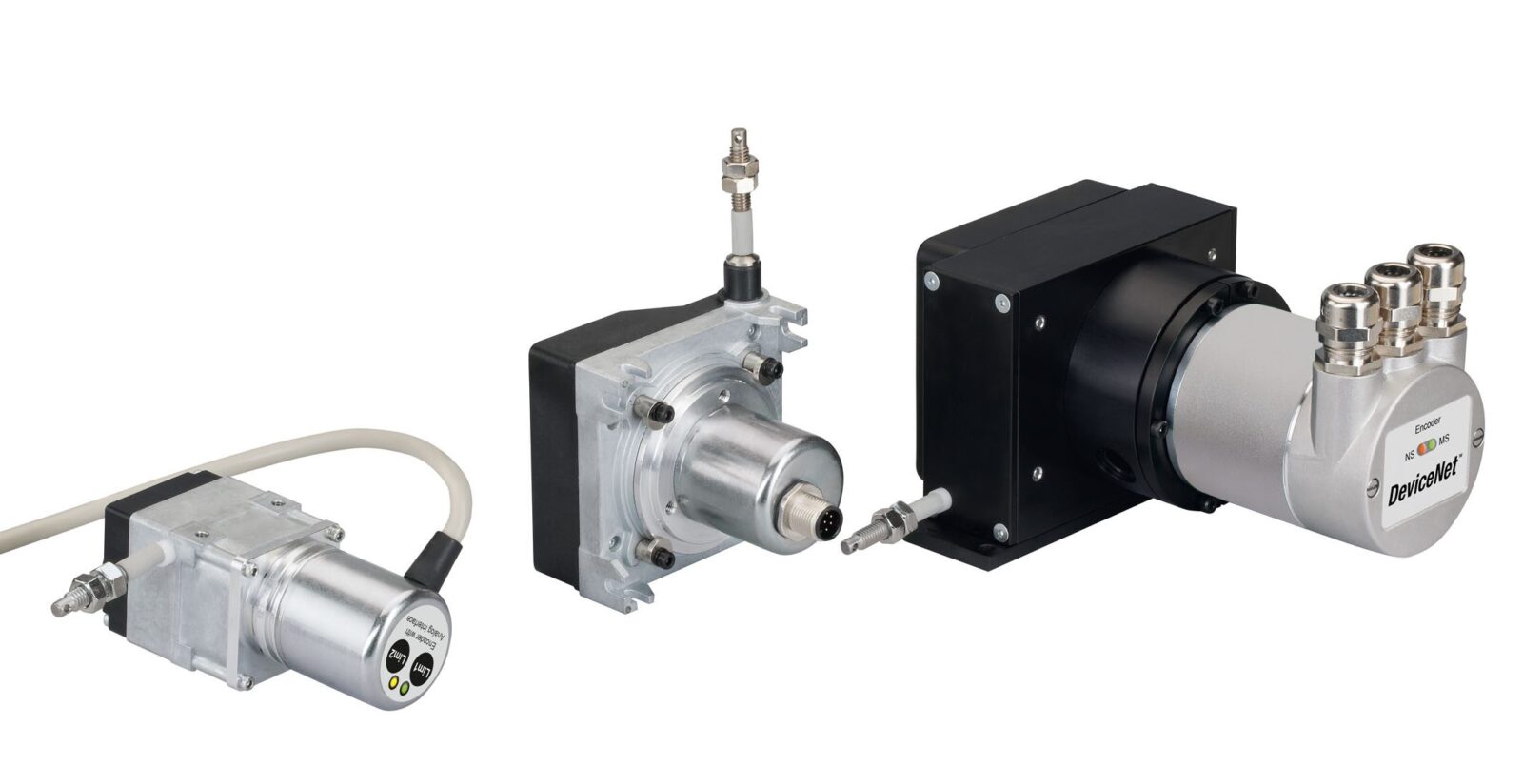
POSITAL’s LINARIX draw wire sensors measure linear motion by displacing a stainless steel wire wound around a wire drum that actuates the rotary encoder coupled to it via coupling. A spring is used to retract the wire in the housing. The encoder provides a proportional output. Measurements are highly accurate, reliable and the systems have very long lifetime
The LINARIX line offers a wide range of measurement lengths ranging from 1 m to 30 m [3 to 98 ft] and position output in almost every available industrial interface both analog and digital as well as incremental and absolute. The line is featured with different mechanical options, housing materials and springs to enable you to always find the most suitable product for your application
Compared to conventional linear pots and linear measurement systems using multiple gears and encoders LINARIX line are more durable and can be used to replace them directly avoiding common problems of slippage and wear. Draw wire sensors from POSITAL provide extremely precise measurements because of inherent accuracy of encoders while rugged construction ensures reliable performance even under extreme conditions.
Call us for more info at 856-727-9500
"*" indicates required fields






 856-727-9500
856-727-9500