Netzer
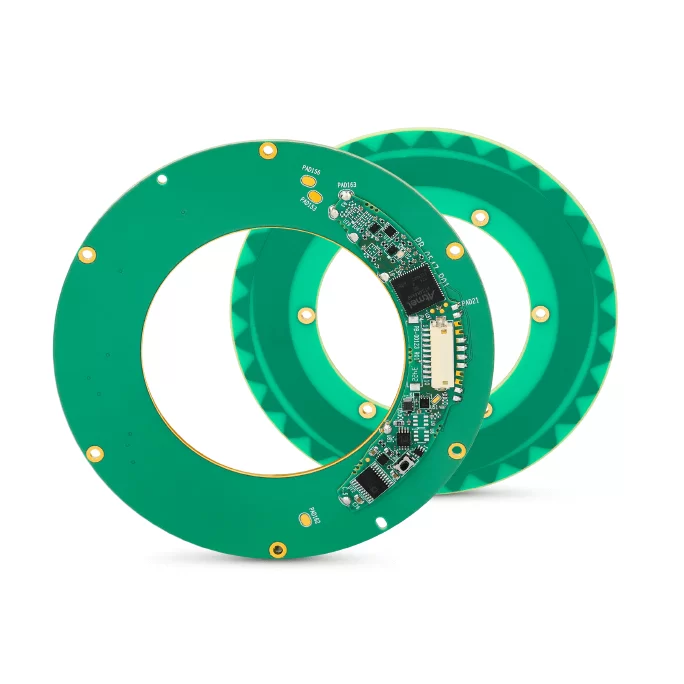
Netzer VLX-100
Part no.: Netzer VLX-100
Key Features
• 100mm diameter
• SSI, BiSS-C
• Up to 20 bits resolution
• High tolerance to EMI, RFI and magnetic fields
Netzer VLX encoders are ideal for OEM applications. Featuring an open frame, 2 plate design, the sensor is lightweight, highly tolerant to temperature, shock, EMI, RFI and magnetic fields. Iit offers a unique combination of high performance at an economical cost.
Call us for more info at 856-727-9500
"*" indicates required fields






 856-727-9500
856-727-9500