Home » Blog
Blog

POSITAL has introduced an inexpensive and flexible alternative for safety critical motion control systems When combined with functional safety PLCs these devices are suitable for applications that are required to conform to Performance Level PL d Cat 3 according to

Despite their perceived simplicity potentiometers can still be an appropriate option in today s ever complicated automation industry Fundamentally a variable resistor modern potentiometers also offer more traditional outputs such as voltage and current which are common to more expensive

Safety hygiene and accuracy are critical in food and beverage production and packaging While sensors can help to achieve the necessary level of accuracy and efficiency their requirements must extend far beyond the traditional specs of resolution and communication interface
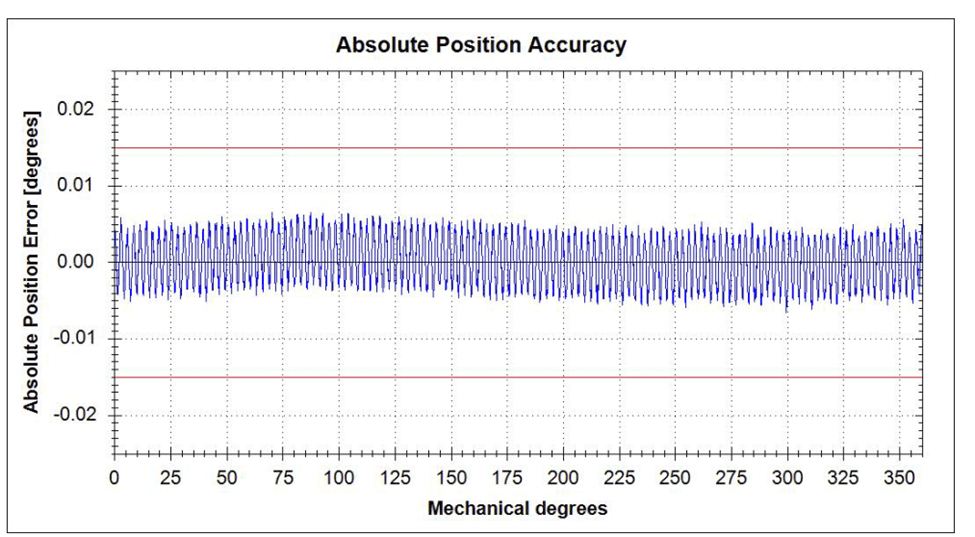
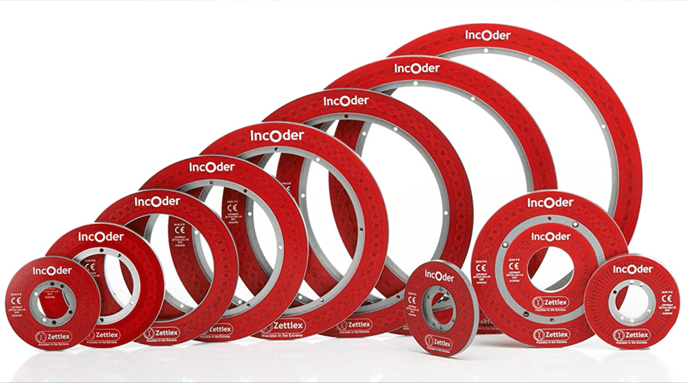
Zettlex IncOders are non contact devices for precision angle measurement They work like a transformer using an inductive technique IncOders may be considered as an inductive angle encoder IncOders are ideally suited to harsh environments where potentiometers optical or capacitive

Everight Position is pleased to announce that they have been named an Outstanding Small Business Supplier by Lockheed Martin Missiles and Fire Control

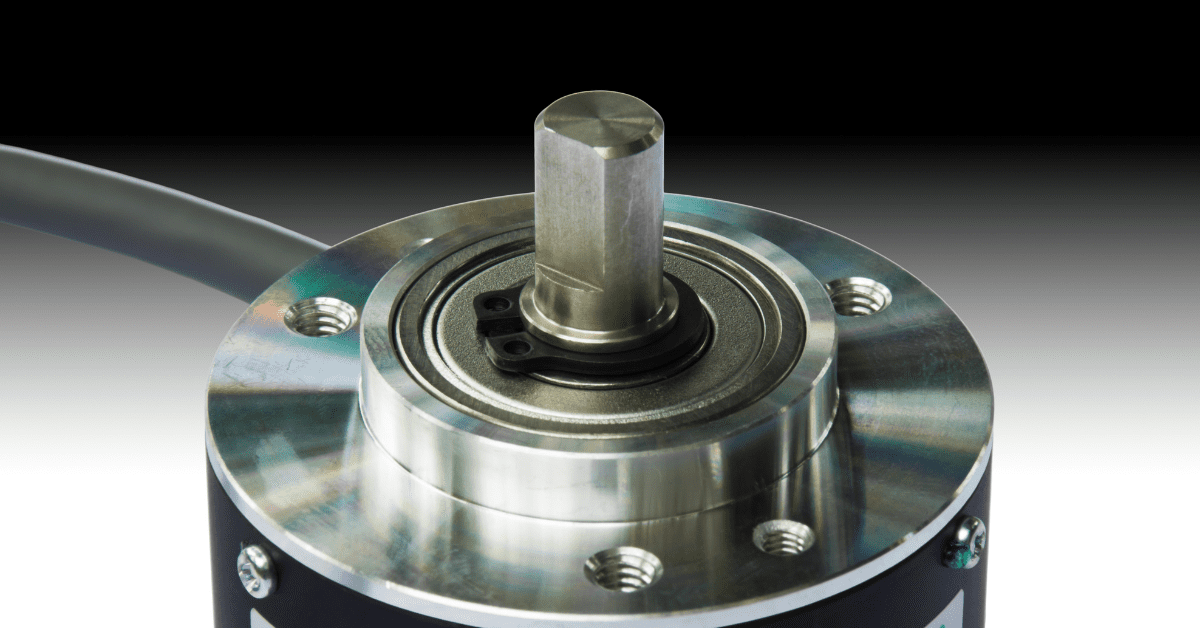
Netzer Precision Position Sensors is introducing the VLH 35 a new product designed to meet the needs of the servo motor industry and its requirements for the next generation of industrial rotary motion control
There is a lot of talk about data these days But what can be just important as the data is how you communicate it
Rotary encoders are used in a variety of applications to provide feedback on position speed direction or angle There are several different encoder types
Menu

 856-727-9500
856-727-9500